Example: All_Dribinski¶
# -*- coding: utf-8 -*-
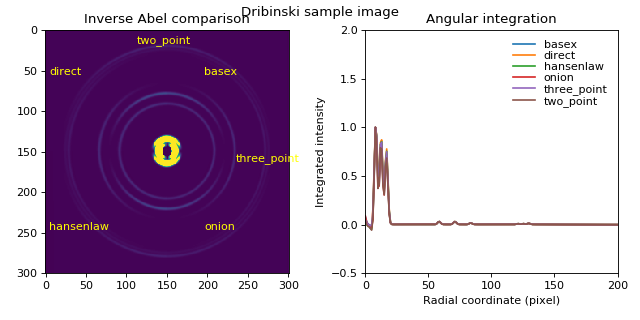
# This example compares the available inverse Abel transform methods
# for the Ominus sample image
#
# Note it transforms only the Q0 (top-right) quadrant
# using the fundamental transform code
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
from __future__ import unicode_literals
import numpy as np
import abel
import collections
import matplotlib.pylab as plt
from time import time
fig, (ax1,ax2) = plt.subplots(1, 2, figsize=(8,4))
# inverse Abel transform methods -----------------------------
# dictionary of method: function()
transforms = {
"direct": abel.direct.direct_transform,
"hansenlaw": abel.hansenlaw.hansenlaw_transform,
"onion": abel.dasch.onion_peeling_transform,
"basex": abel.basex.basex_transform,
"three_point": abel.dasch.three_point_transform,
"two_point": abel.dasch.two_point_transform,
}
# sort dictionary:
transforms = collections.OrderedDict(sorted(transforms.items()))
# number of transforms:
ntrans = np.size(transforms.keys())
IM = abel.tools.analytical.SampleImage(n=301, name="dribinski").image
h, w = IM.shape
# forward transform:
fIM = abel.Transform(IM, direction="forward", method="hansenlaw").transform
Q0, Q1, Q2, Q3 = abel.tools.symmetry.get_image_quadrants(fIM, reorient=True)
Q0fresh = Q0.copy() # keep clean copy
print ("quadrant shape {}".format(Q0.shape))
# process Q0 quadrant using each method --------------------
iabelQ = [] # keep inverse Abel transformed image
for q, method in enumerate(transforms.keys()):
Q0 = Q0fresh.copy() # top-right quadrant of O2- image
print ("\n------- {:s} inverse ...".format(method))
t0 = time()
# inverse Abel transform using 'method'
IAQ0 = transforms[method](Q0, direction="inverse", basis_dir='bases')
print (" {:.4f} sec".format(time()-t0))
iabelQ.append(IAQ0) # store for plot
# polar projection and speed profile
radial, speed = abel.tools.vmi.angular_integration(IAQ0, origin=(0, 0), Jacobian=False)
# normalize image intensity and speed distribution
IAQ0 /= IAQ0.max()
speed /= speed.max()
# method label for each quadrant
annot_angle = -(45+q*90)*np.pi/180 # -ve because numpy coords from top
if q > 3:
annot_angle += 50*np.pi/180 # shared quadrant - move the label
annot_coord = (h/2+(h*0.9)*np.cos(annot_angle)/2 -50,
w/2+(w*0.9)*np.sin(annot_angle)/2)
ax1.annotate(method, annot_coord, color="yellow")
# plot speed distribution
ax2.plot(radial, speed, label=method)
# reassemble image, each quadrant a different method
# for < 4 images pad using a blank quadrant
blank = np.zeros(IAQ0.shape)
for q in range(ntrans, 4):
iabelQ.append(blank)
# more than 4, split quadrant
if ntrans == 5:
# split last quadrant into 2 = upper and lower triangles
tmp_img = np.tril(np.flipud(iabelQ[-2])) +\
np.triu(np.flipud(iabelQ[-1]))
iabelQ[3] = np.flipud(tmp_img)
im = abel.tools.symmetry.put_image_quadrants((iabelQ[0], iabelQ[1],
iabelQ[2], iabelQ[3]),
original_image_shape=IM.shape)
ax1.imshow(im, vmin=0, vmax=0.15)
ax1.set_title('Inverse Abel comparison')
ax2.set_xlim(0, 200)
ax2.set_ylim(-0.5,2)
ax2.legend(loc=0, labelspacing=0.1, frameon=False)
ax2.set_title('Angular integration')
ax2.set_xlabel('Radial coordinate (pixel)')
ax2.set_ylabel('Integrated intensity')
plt.suptitle('Dribinski sample image')
plt.tight_layout()
plt.savefig('plot_example_all_dribinski.png', dpi=100)
plt.show()
(Source code, png, hires.png, pdf)
{kind=link}
{kind=link}